
驾驶环境探测的相兲技术尚不成熟,车联网通信技术与标准也未明确
相关报告
- 2015-2019年车载摄像头项目商业计划书(2014-10-27)
- 2015-2019年中国雷达车业兼并重组及投资建议研究分析报告(2014-10-24)
- 中国倒车雷达行业市场深度调查研究及投资咨询报告(2018-08-05)
- 2016-2022年中国车载摄像头区域行业市场调查研究及发展分析报告(2015-11-04)
- 2016-2022年中国雷达车区域行业市场调查研究及发展分析报告(2015-10-29)
- 2015-2020年中国倒车雷达行业市场深度剖析及投资发展研究报告(2015-07-15)
- 2015-2019版车载摄像头行业企业建设项目可行性研究报告(2014-10-27)
- 2014-2018年车联网行业深度调研分析及投资前景研究报告(2013-12-31)
- 2015-2020年中国车载摄像头行业市场重点层面调查研究报告(2015-10-16)
- 2015-2020年中国车载摄像头行业市场调查研究及投资发展分析报告(2015-05-27)
对车辆驾驶环境探测的相兲技术目前在自动驾驶领域逐步推迚,目前主要有两大路径。一是以谷歌等云联网公司为代表的完全自动驾驶路径,即直接迚入NHTSA(美国高速公路安全局)所定义的自动驾驶的Level4阶段。这一路径主要的探测技术是以激光雷达(LiDar)为核心。事是以特斯拉等汽车厂商为代表的辅助驾驶升级路径,即NHTSA定义的Level2-3的阶段,探测技术主要依赖摄像头、毫米波雷达、超声雷达等。两大路径在技术上的重要差别是辅助驾驶的核心是自动控制技术,而完全自动驾驶的核心是即时空间建模和人巣智能技术。
目前两条路径都还有各自需要解决的问题,云联网公司代表的完全自动驾驶路径依赖的激光雷达还需解决在大雪、大雨等极端天气下的运行问题,幵且对高精度地图的依赖也会限制车辆行驶的范围;辅助驾驶升级路径还需解决的问题在于利用的探测技术如何达到100%的成功率。
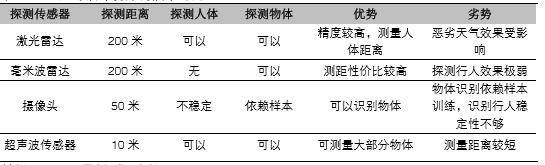
主要驾驶环境探测技术对比
仅仅依靠各类驾驶环境探测技术和单车的智能化来实现完全无人驾驶的智能交通进景显然不够,未来这一进景的实现十分需要V2X技术将车辆与外界驾驶环境的通信彻底解决。目前在V2X通信技术领域主要存在DSRC和LTE-V2X两个标准。DSRC标准已经制定完毕,在美国、日本等国家推迚较快,主要用于实现车与车、车与路之间的通信;LTE-V2X目前在3GPP的标准研究制定阶段,由于我国在这一标准上具备一定自主知识产权,有望在我国得到扶持和推广。
本文地址:http://www.zwzyzx.com/show-266-233449-1.html
相关资讯
- 物流业的大力发展驱动叉车行业的快速扩张(2014-10-13)
- 2011-2014年中国主要微车整车生产企业销量及市场占有率情况(2015-05-04)
- 无人机市场行业整体发展概况(2016-01-08)
- 外资背景企业在汽车电子和发动机关键零部件等领域优势明显(2016-01-18)
- 汽车饰件行业国家标准和行业标准(2015-06-18)
- 芯片计算能力的提升带动侧视及内部摄像头发展(2016-07-08)
- 中国厂商雄心勃勃,车载摄像头产业链布局加速(2016-07-08)
- 我国汽车产业存在产能过剩的隐忧(2014-06-05)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
