
全自动平衡机工作原理及结构情况
相关报告
- 2015-2020年中国平衡机行业市场深度剖析及投资发展研究报告(2015-07-22)
- 2016-2022年中国平衡机区域行业市场调查研究及发展分析报告(2015-11-10)
- 2014-2018年中国平衡机行业市场深度调查研究及投资前景分析报告(2014-04-21)
- 2015-2020年中国平衡机行业市场重点层面调查研究报告(2015-09-06)
- 2013-2014年全国平衡机制造企业信息调查暨行业分析报告(2014-05-15)
- 2016-2022年中国平衡机行业市场深度调查研究及投资咨询报告(2015-12-04)
- 全国主要地区平衡机产业发展状况暨投资环境调查研究报告(2014-11-27)
- 2015-2020年中国平衡机行业市场主要领域调查分析报告(2015-09-06)
- 2014-2018年中国平衡机行业市场深度调查分析及投资战略研究报告(2014-04-21)
- 2014-2018年中国平衡机行业市场发展研究及投资前景分析报告(2014-04-21)
1、全自动平衡机工作原理


具有不平衡量的回转零部件在高速旋转时会产生周期性的激振力,引起振动。不平衡量越大,振幅越大。采集和分析振动信号,通过数学模型或算法,可以获得不平衡量的大小和方位,并确定修正方案,由智能控制系统指挥全自动平衡机执行指令,完成不平衡量的修正。
全自动平衡机主要包括三个基本工作步骤:测量、计算和去重。在测量步骤,驱动电机驱动待处理工件转动,不平衡量会引发振动,振动传感器获取振动信号;在计算步骤,智能控制系统根据振动信号计算出不平衡量,基于回转零部件的材质、密度、结构,结合切削刀具形态,以不平衡量为基础,先后自动计算出需要去重的质量和相位、去重的体积、进刀深度或长度;在去重步骤,智能控制系统操控机械装置执行对刀和进刀等切削动作,完成不平衡量修正。
2、全自动平衡机结构
全自动平衡机是典型的光机电气一体化设备,不同应用领域的全自动平衡机结构略有不同,但均包括机械系统和智能控制系统。
(1)机械系统
机械系统主要包括机器主体、测量装置、机械手及切削装置。机器主体主要是设备零部件的主要载体,包括框架、底板和机柜;测量装置、机械手及切削装置是设备核心功能部件。
为提高机器工作效率,一台机器可能包括多个测量装置和切削装置。以公司五工位全自动平衡机为例,包括机器主体、两套测量装置、两套切削装置、一套换料装置和一个五爪机械手。
①测量装置
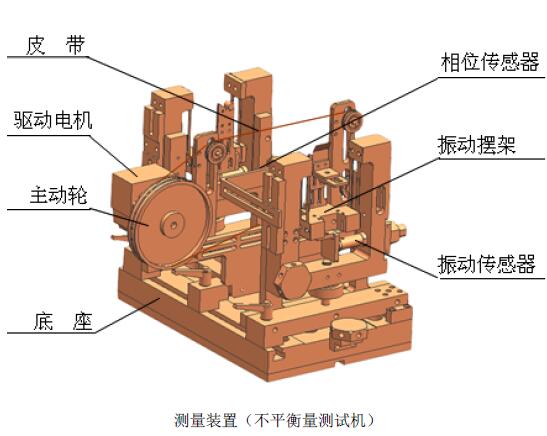
测量装置由底座、振动摆架、驱动电机、振动传感器、相位传感器、光电传感器和皮带组成。在测量时,待处理工件置于振动摆架之上,驱动电机带动皮带使待处理工件升速到指定转速,振动传感器获得振动信号,据此计算出不平衡量,作为判断工件是否合格以及后续切削去重量的计算依据。
测量装置(不平衡量测试机)
②切削装置
切削装置包括夹具、滑台、主轴、刀具、驱动电机、光电传感器和若干接近开关传感器等零部件组成。待处理工件完成不平衡量测量及计算后,由机械手搬运至夹具,驱动电机驱动滑台带动主轴及刀具,光电传感器监控刀具位置,接近开关传感器监控滑台位置,先对刀后进刀,完成对工件的切削去重。
③机械手
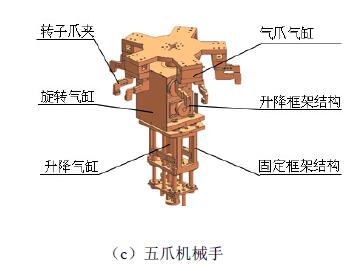
机械手由固定框架结构、升降框架结构、气爪气缸、升降气缸、旋转气缸和接近开关传感器等零部件组成。机械手按预先设定时序,由各气缸执行抓取、升降和旋转动作,将待处理工件在各装置间移动。
两工位全自动平衡机采用两爪机械手,旋转角度为180度,四工位全自动平衡机采用四爪机械手,旋转角度为90度,五工位全自动平衡机采用五爪机械手,旋转角度为72度。
(a)两爪机械手(b)四爪机械手
(c)五爪机械手
(2)智能控制系统
智能控制系统是全自动平衡机的大脑和灵魂。全自动平衡机智能控制系统集成了整周期采样、时域平均算法、互相关算法、定位控制算法、动态密度自动补偿算法、切削数学模型及影响系数测量算法等算法或模型,指挥和操控全自动平衡机自动地完成测量、定位、计算、搬运、切削等工序或步骤。
本文地址:http://www.zwzyzx.com/show-267-191372-1.html
下一篇:平衡机发展史情况
相关资讯
- 国内冷冻设备行业管理体制和行业政策(2015-05-27)
- 未来二年我国胶印CTP设备国内市场容量(2015-01-27)
- 我国煤炭洗选储运设备行业周期性特征(2014-06-20)
- 节能照明产品行业技术水平及发展趋势(2016-01-28)
- LCD市场需求保持平稳增长(2015-04-14)
- 工业化打印技术介绍(2015-01-27)
- 包装机械行业自身所需的部分高端精密加工设备依赖进口(2015-04-07)
- 国内矿物计量采样设备行业进入壁垒(2014-12-29)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
