
瓶颈突破在即,无人驾驶进程有望持续加速
相关报告
- 2014-2018年中国高性能计算机行业市场深度剖析及投资前景趋势研究报告(2014-06-18)
- 2016-2022年中国车联网导航区域行业市场调查研究及发展分析报告(2015-11-04)
- 2015-2020年中国车联网导航行业市场调查研究及投资发展分析报告(2015-05-27)
- 2015-2020年中国车联网导航行业市场深度剖析及投资发展研究报告(2015-07-15)
- 2014-2018年中国高性能计算机行业市场深度调查分析及投资战略研究报告(2014-06-18)
- 2014-2018年中国车联网行业市场深度研究分析及投资决策咨询研究报告(2014-01-07)
- 2014-2018年中国高性能计算机行业市场发展研究及投资前景分析报告(2014-06-18)
- 2015-2020年中国车联网导航行业市场重点层面调查研究报告(2015-10-17)
- 2015-2020年中国车联网导航行业市场主要领域调查分析报告(2015-10-17)
- 2015-2020年中国车联网导航行业深度调研及市场投资发展研究报告(2015-07-15)
目前产业和市场上对无人驾驶的发展趋势,没有异议。但是从发展周期而言,我们仍在朦胧阶段。争论点在于:无人驾驶,何时爆发,真正进入落地阶段?
当前在硬件端、软件端和政策端,有三大瓶颈限制着无人驾驶的发展。三大瓶颈突破之日,就是无人驾驶爆发之时。
无人驾驶瓶颈主要涉及硬件成本和法规完善
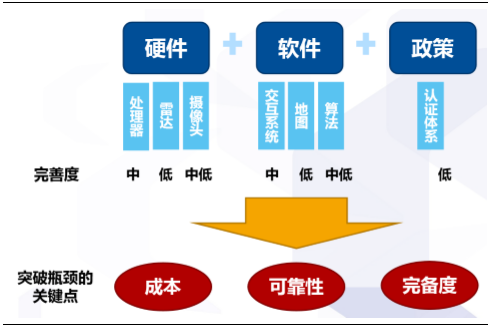
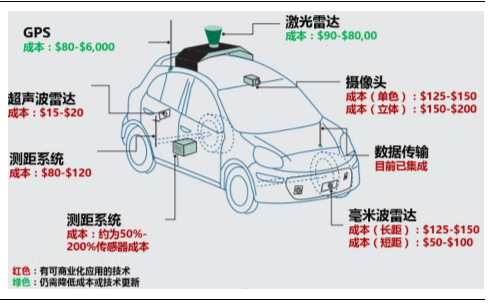
硬件端以雷达为代表的设备成本不够亲民。研究报告目前无人驾驶汽车的硬件设备,超声波雷达、毫米波雷达、摄像头、测距系统、数据传输等均有可商业化应用的技术,而GPS和激光雷达则尚未达到要求,仍需降低成本或更新技术。激光雷达是硬件成本下降的关键,是我们的跟踪指标。
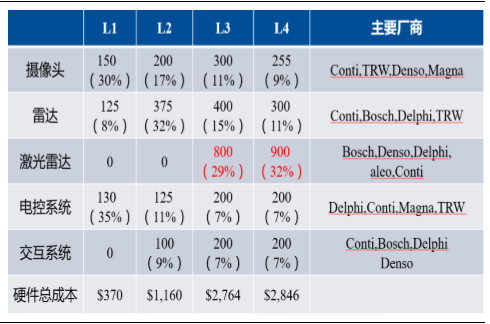
硬件端来看成本依然偏高
激光雷达,成为硬件成本下降关键,是我们的跟踪指标
技术创新正在推动雷达成本成量级下降,市场分析最初以Velodyne-64波束为代表的旋转雷达售价高达7万美元,目前谷歌使用的混合固态雷达VLP-16PUCK价格则下降到7999美元,未来的固态雷达有望降成本进一步压缩到250美元,有望在2017年开始量产。
技术创新有望推动激光雷达成本成量级下降

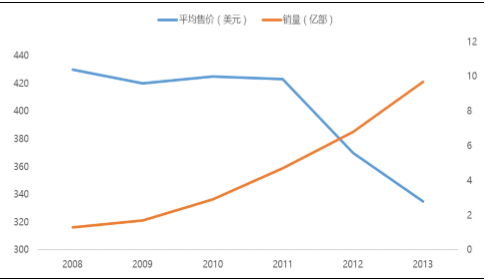
IT规律决定,技术与规模化驱动,成本有望快速下降。以智能手机为例,自2011年智能手机销量突破4亿部后,其平均售价从420美元迅速降低到330美元,销量则高歌猛进2年内突破10亿部。随着无人驾驶汽车的推广和普及,激光雷达的成本必将进一步大幅缩减。
IT规律决定,技术与规模化驱动,成本有望快速下降
软件端无人驾驶有两种实现路线。路线一以Google为代表,预先存储高精度地图,而后根据汽车所处位置与地图匹配;路线二以mobileye为代表,通过摄像头等硬件感知周边环境,利用图像识别算法识别周边物体。
软件端:无人驾驶有两种实现路线
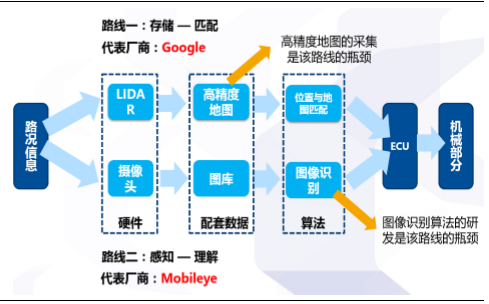
软件端路线一,高精度地图是核心
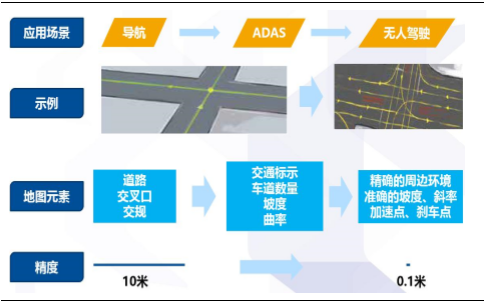
高精度地图的采集是路线一的瓶颈。无人驾驶需要精确的周边环境,准确的坡度、斜率、加速点和刹车点,精度需要达到0.1米,而目前的导航软件精度只能达到10米。
路线二图像识别也面临多项瓶颈。目前能够正确识别物体的概率最高仅96.5%,识别时间最快为0.25秒,这二者对于无人驾驶均远远不够。
软件端路线二,利用图像识别面临多个瓶颈
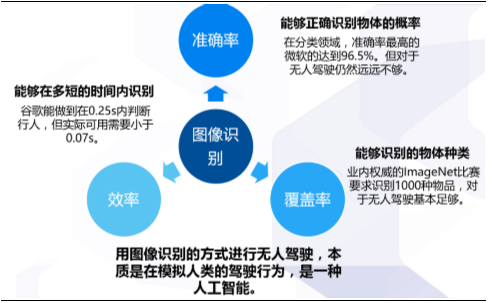
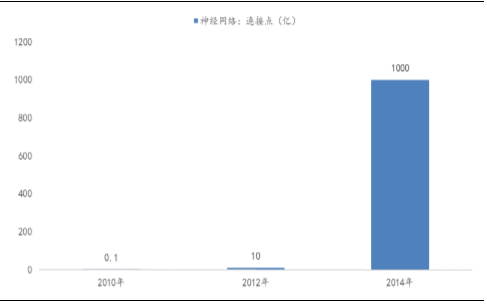
图像识别瓶颈有望在人工智能迅猛发展的驱动下取得突破。图像识别本质上是在模拟人类驾驶行为,是一种人工智能。神经网络连接数是深度学习的重要指标,目前连接数每两年翻100倍,人工智能正在爆发式增长,图像识别的瓶颈有望短期内突破。
神经网络连接数是深度学习重要指标,连接数每两年翻100倍
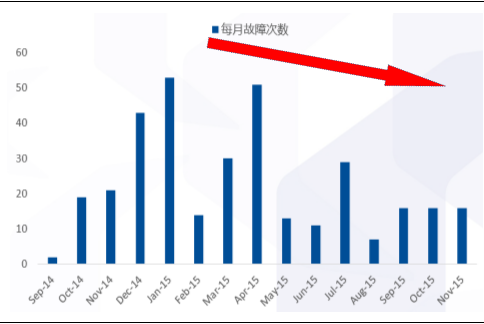
谷歌无人驾驶算法可靠性正在提高。2014年第4季度,谷歌无人驾驶汽车每行驶785英里就会出次故障。一年之后,谷歌无人驾驶汽车每行驶5,318英里才出故障,无故障行驶里程提高了577%。
谷歌无人驾驶算法可靠性正在提高
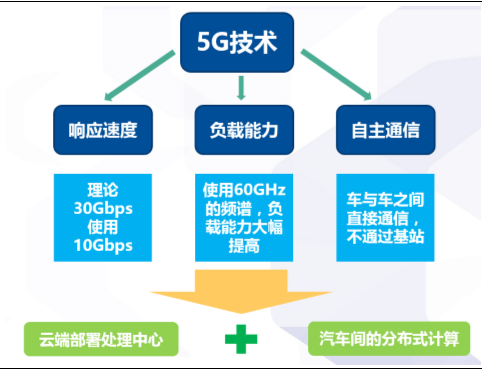
应用场景端5G技术云计算实现必备。5G具有高带宽、高可靠性、低时延的特点,根据此前透露的5G标准制定规范,理想时延低于1毫秒,这让通过云计算控制汽车成为可能。
应用场景端:5G技术是必备,但正式大规模商用在2020年
政策端目前尚不完善,但各国政府对无人驾驶持开放态度。目前无人驾驶的测试在各国是普遍合法的。澳大利亚、比利时、德国、意大利等国推动修改维也纳协议以使无人驾驶合法化。奥巴马宣布未来10年内拨款40亿推进相关法规的起草。
本文地址:http://www.zwzyzx.com/show-269-240932-1.html
相关资讯
- 移动音乐活跃用户高幅增长,网易云音乐同比增长迅猛(2016-09-09)
- 2013年度青海地区互联网主要指标发展情况(2014-03-15)
- UBI千亿级市场格局初显(2016-07-19)
- 数据的获取和分析能力成为互联网营销服务行业制胜的核心因素(2014-06-04)
- 低压快充技术将成为主流快速充电方式(2016-10-08)
- 互联网金融行业的区域性、季节性和周期性特征(2015-12-23)
- 影响国内印制电路板行业发展不利因素(2015-06-15)
- 国内信息化行业技术发展水平(2014-12-30)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
