
惯性导航技术原理
相关报告
- 2016-2022年中国车载移动网络导航行业市场深度调查研究及投资咨询报告(2015-11-30)
- 2015-2020年中国导航系统行业市场深度剖析及投资发展研究报告(2015-07-15)
- 2014-2018年中国北斗导航行业市场发展研究及投资咨询研究报告(2014-01-13)
- 2015-2020年中国导航仪行业市场深度剖析及投资发展研究报告(2015-07-22)
- 2015-2020年中国导航仪行业深度调研及市场投资发展研究报告(2015-07-22)
- 2015-2019年中国导航系统企业拟IPO上市细分市场研究报告(2014-10-28)
- 2015-2020年中国航空惯性导航行业市场主要领域调查分析报告(2015-09-11)
- 2015-2020年中国惯性导航行业市场重点层面调查研究报告(2015-09-14)
- 全国主要地区惯性导航产业发展状况暨投资环境调查研究报告(2014-12-01)
- 2014版全国主要地区导航仪及制导仪产业发展状况暨投资环境调查研究报告(2014-05-07)
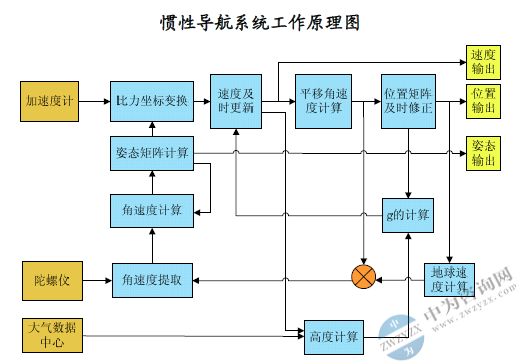
惯性导航技术的基本工作原理是以牛顿力学定律为基础,通过测量运动载体在惯性参考系的角速度和加速度,将它对时间进行积分,且把它变换到导航坐标系中,进而通过运算得到运动载体在导航坐标系中的速度、位置及姿态等信息。基于该技术的惯性导航系统可装备于运动载体(如飞机、船舶等)并用于对其实现导航定位,系统通过连续测得运载体角速度和线速度后通过积分运算可推算出其下一点的位置,因此可连续测出运动载体的当前位置。
本文地址:http://www.zwzyzx.comhttp://www.zwzyzx.com/show-336-27146-1.html
上一篇:我国导航行业产业鼓励政策
下一篇:GNSS/INS组合导航技术原理
相关资讯
- 电子设备可靠性相关情况介绍(2015-01-16)
- 国内电磁屏蔽及导热器件行业主要法律法规和政策(2015-08-06)
- 移动互联网影响下的车联网产业链得到扩充(2016-09-06)
- 国内AFC行业标准及技术规范(2014-12-30)
- 移动通信技术促进视频监控系统发展(2015-04-14)
- 快速充电的实现方式(2016-09-14)
- 思创医惠:智慧医疗2.0时代的领航者(2016-10-28)
- 国内锂电池检测行业主要壁垒(2016-01-19)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
