
与视觉相比,激光雷达+SLAM的方案优势突出
相关报告
- 2015-2020年中国ATM机行业市场调查研究及投资发展分析报告(2015-05-29)
- 2016-2022年中国卸扣行业市场深度调查研究及投资咨询报告(2015-12-07)
- 2015-2019年中国木工机械企业拟IPO上市细分市场研究报告(2014-10-29)
- 2014-2018年中国乒乓球用品行业市场深度调查分析及投资战略研究报告(2014-04-29)
- 2015-2020年中国羧酸衍生物行业运行研究及市场投资发展分析报告(2015-05-20)
- 2015-2020年中国自卸载重车行业市场重点层面调查研究报告(2015-10-15)
- 2015-2019版休闲服行业企业建设项目可行性研究报告(2014-11-18)
- 2015-2019版防护耳塞耳罩行业企业建设项目可行性研究报告(2014-11-10)
- 2014-2018年中国电真空器件行业市场发展研究及投资咨询研究报告(2014-04-12)
- 2015-2020年中国聚硫橡胶行业运行研究及市场投资发展分析报告(2015-05-22)
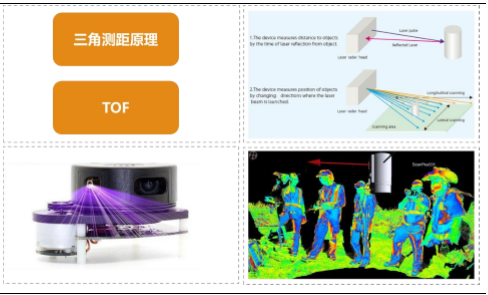
多传感融合保证安全,技术难点在于激光雷达。激光雷达、毫米波雷达、3D摄像头等多种传感器在功能上的冗余,保证了服务机器人的安全性和正常使用。其中激光雷达是绕不开的核心。激光雷达的原理是:通过发射n条激光利用三角测距原理(低成本方案)或TOF(TimeofFlight,高成本方案)来测量周围物体与自身的距离,获得精度较高的距离信息——点云数据。
激光雷达成像
激光雷达是传感器的一种,对于服务机器人如果要实现精确的服务,满足复杂场景下的用户需求,除了精准的定位,还需要结合定位信息对环境进行识别。作为入口,激光雷达是SLAM的重要入口。
SLAM(SimultaneousLocalizationAndMapping)的含义是即时定位与地图构建,指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
自主定位导航主要应用于商场导购、自动送餐、智能仓储、安全巡逻、病床看护、除尘清扫等。自主定位导航需要三大技术:
(1)实时定位。GPS没办法用,目前GPS只能实现到半米的精度,而且实时定位的更新频率很快,需要达到10次/秒的更新频率,目前的定位技术没办法满足。定位包括相对定位和绝对定位。相对定位主要依靠内部本体感受传感器如里程计、陀螺仪等,通过给定初始位姿,来测量相对于机器人初始位姿的距离和方向来确定当前机器人的位姿,也叫做航迹推测(DeadReckoning,DR);绝对定位主要采用主动或被动标识、地图匹配、GPS、或导航信标进行定位。位置的计算方法包括有三角测量法、三边测量法和模型匹配算法等。
(2)绘制地图。导航领域是有专人绘制的,但是在家庭里面,是不可能有人来绘制地图的,家庭的家居会实时变化,所以需要机器人能在没有人工干预的情况下画图;
(3)路径规划。导航仪的核心就是路径规划,机器人绘制的地图是任何一个方向都可以走的,机器人的路径规划还包括避障和直接控制行为,导航仪是由人来决定,机器人是用算法决定的,谷歌的无人驾驶汽车,主要的工作量都在导航算法上。
以扫地机器人为例:国际上有一个标准场地,80平米,没有导航模块的一般会在40多分钟,80%的清洁率。而装上公司的SLAM模块后,10分钟就达到了95%的覆盖率。如果把视野放到其他领域,必须要非常高效的移动到目的地,这是不可绕过的技术方案。做一个简单的对比:
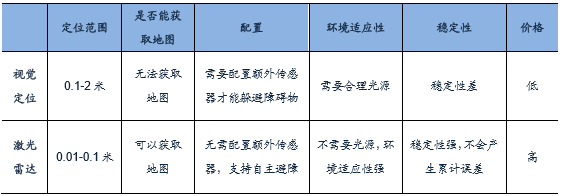
(1)视觉定位。定位范围是0.1-2米,无法获得地图,需要配额外的传感器才能躲避障碍物,需要合理的光源才能适应环境;稳定性比较差;
(2)如果采用激光雷达的方式,定位精度可以控制在0.01-0.1米,并且可以获得精确的地图;支持自主躲避障碍,不会产生累计误差。
激光雷达和视觉定位方式的对比
激光雷达成像

激光雷达在服务机器人上的应用刚刚开始。激光雷达优点是可以实时测量周围物体和障碍物的距离,且可以测量绝大部分物体,比如谷歌无人驾驶汽车、BigDog机器人都是用不同型号的激光雷达进行人体的定位;缺点是在大雨大雪等恶劣天气中使用效果会受到影响,而毫米波雷达精度不高、视场小,但测量距离远,可以达到200米,刚好弥补了激光雷达的短板。激光雷达是“机器之眼”,能够获得周边环境的点云数据模型,现在多用于在测量中有一定精度要求的领域,或需要测量自身与人体距离的智能装备,在测量与人的距离这一功能上尚无完美替代方案。在目前主流的前沿机器人身上已经装备了激光雷达模块,如Atlas和pepper等。
激光雷达在服务机器人上面的全面应用

本文地址:http://www.zwzyzx.com/show-336-229023-1.html
相关资讯
- 物联网产业加速发展,跨国企业瞄准物联网增长机遇(2015-08-07)
- 未来投资焦点再现,关注数字浪潮下的新兴与转型(2016-07-22)
- 双摄像头结构分类(2016-09-20)
- 物联网:一次信息产业革命(2016-09-26)
- 我国已成为全球最大的工业机器人消费市场(2016-09-05)
- 珠三角集成电路市场需求一直占据全国的40%以上(2015-05-28)
- 三大运营商为主,第三方IDC为辅且长期存在(2016-12-16)
- 2012年中国笔记本电脑产量达到2.53亿台,同比增长约为6%(2014-06-27)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
