
无人驾驶三大模块,从感知到执行再到联网
相关报告
- 2016-2022年中国车联网导航区域行业市场调查研究及发展分析报告(2015-11-04)
- 2014-2018年中国车联网行业市场深度剖析及投资前景趋势研究报告(2014-01-05)
- 2016-2022年中国车联网导航行业市场深度调查研究及投资咨询报告(2015-11-30)
- 2014-2018年中国车联网行业市场深度研究分析及投资决策咨询研究报告(2014-01-07)
- 中国车联网导航行业市场深度调查研究及投资咨询报告(2018-08-05)
- 2015-2020年中国车联网导航行业深度调研及市场投资发展研究报告(2015-07-15)
- 2014-2018年中国高性能计算机行业市场深度调查研究及投资前景分析报告(2014-06-18)
- 2015-2020年中国车联网导航行业市场主要领域调查分析报告(2015-10-17)
- 2014-2018年中国车联网区域市场调查研究分析及投资前景研究报告(2014-01-05)
- 2015-2020年中国车联网导航行业市场深度剖析及投资发展研究报告(2015-07-15)
无人驾驶由感知、执行和联网三大系统并驾齐驱。感知系统感知外界环境信息,与车联网捕捉到的车辆信息一同传递给执行系统,执行系统经识别作出判断,并作出相应操作。
无人驾驶由三大模块驱动
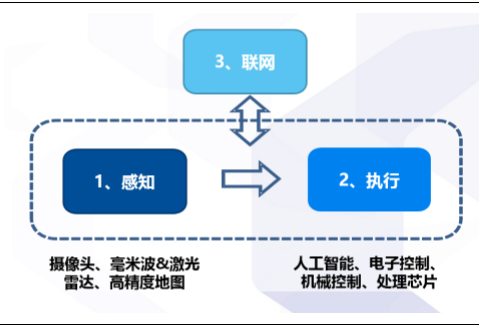
感知系统是无人驾驶汽车的眼睛,主要由负责空间与环境感知的硬件组成,即摄像头、毫米波雷达&激光雷达和高精度地图。
研究报告摄像头的作用是分辨物体和获取即时交通信息。红外热成像摄像头能够探测极微小的温差,将温差转换成实时视频图像,可显示出人和物体的热轮廊,看不清物体的真实面目。
红外热成像摄像头能在夜间发挥作用

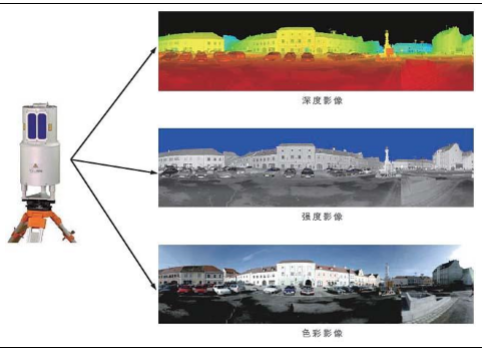
市场分析雷达的作用是探测目标的位置、速度等特征量。激光雷达,是利用激光、全球定位系统GPS和惯性测量装置三者合一,获得数据并生成精确的数字高程模型,精确描绘车辆所处环境。
激光雷达可精确描绘车辆所处环境
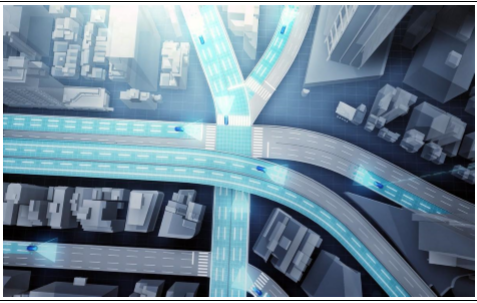
高精度地图则是为无人驾驶汽车导航定位,一辆能调用高精度地图数据的自动驾驶汽车,能够提前选择合适的行驶策略,把对环境的监测重点放在应对突发情况上。提升车辆安全性的同时,还有助于降低车载传感器和控制系统的成本。
高精度地图为无人驾驶汽车导航行为
执行系统是无人驾驶系统的双手。处理芯片能够通过感应器和摄像头收集和处理无人驾驶汽车周围的环境信息,并用以指导无人驾驶汽车的行驶,防止发生可能的碰撞。
本文地址:http://www.zwzyzx.com/show-336-240928-1.html
上一篇:无人驾驶,汽车的终极未来
相关资讯
- 国内企业级网络设备行业的进入壁垒(2014-12-10)
- 医疗:虚拟现实教学前景广阔(2016-10-24)
- 未来服务机器人市场容量估算:PC与PR(2016-09-06)
- 国内移动智能终端软件行业特点(2015-05-08)
- 目前惯性技术应用领域与规模正呈现快速增长的态势(2014-06-08)
- 进入我国道路交通安全产品行业主要障碍(2014-05-26)
- 智能系统领域发展概况(2015-07-06)
- 花椒:从新闻自媒体转型为“全民秀场”(2016-03-31)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
