
感知:雷达惯导系统算法
相关报告
- 2014-2018年中国温度传感器行业深度调查暨市场分析报告(2014-05-07)
- 2016-2022年中国水分湿度传感器区域行业市场调查研究及发展分析报告(2015-11-10)
- 2015-2019年中国气体传感器企业拟IPO上市细分市场研究报告(2014-11-05)
- 2014-2018年中国互联网视频服务行业市场深度分析及投资决策研究报告(2014-06-09)
- 2015-2019版霍尔传感器行业企业建设项目可行性研究报告(2014-11-04)
- 2015-2019年中国射频同轴连接器企业拟IPO上市细分市场研究报告(2014-11-14)
- 2015-2020年中国电源连接器行业市场主要领域调查分析报告(2015-09-15)
- 全国主要地区接近传感器产业发展状况暨投资环境调查研究报告(2014-11-26)
- 2016-2022年中国振动传感器行业市场深度调查研究及投资咨询报告(2015-12-03)
- 2015-2020年中国光纤连接器行业市场调查研究及投资发展分析报告(2015-06-11)
智能汽车面临最大的问题目前还是在于对环境的感知,所以激光雷达是无人车的最重要的零部件。
下图是SICK公司的激光雷达,用于检测周围障碍物,可以返回周围障碍物的距离,误差毫米级。下图的无人车头顶上的5个SICK,价值5辆帕萨特。
下图是SICK公司的激光雷达,用于检测周围障碍物,可以返回周围障碍物的距离,误差毫米级。下图的无人车头顶上的5个SICK,价值5辆帕萨特。
SICK激光雷达

Googlecar上的360度64线激光雷达,和SICK的功能一样,过去价格十几万美金,目前大概在1.5万美金左右。
GoogleCar激光雷达

目前通过车载激光雷达,谷歌汽车可以实时看到如下的3D场景。
GoogleCar激光雷达的3D场景
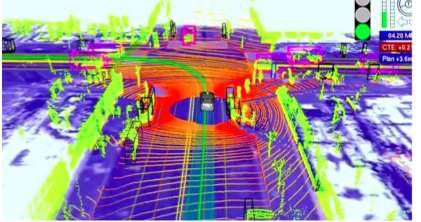
智能汽车的感知技术,主要涉及到同步定位与建模技术(SLAM)的研究。对于目前的SLAM技术来说,这已经是一个很不错的结果,而且在同等传感器,以及实时性要求情况下,不会有太大质的提升。我们从图里能看到树、地面、墙、甚至是每条车道。如果我把图像作为纹理贴在3D模型上的话,似乎都能建一个真的3D地图出来。但是作为一个需要稳定驾驶,熟悉路况的智能系统来说,问题还有很多。因为汽车本身并不知道场景的表示和涵义。也就是说,它仅仅知道有物体在某个位置,但物体究竟是建筑?还是树木?还是路标?仅仅通过这个图还并不知道。
对于建筑和树木来说,看起来好像汽车并不需要知道他们是什么。但是路标就需要非常精确的识别了。即使通过GIS测绘,可以对各条路的速度限制等做到了解,但是对于施工路段、小区里的小路来说,就无能为力了。假设智能汽车作为一个测试者要去参加交规测试,关于最基本的路况信息,它都是无法通过的。这就需要识别了。
本文地址:http://www.zwzyzx.com/show-333-203556-1.html
上一篇:定位:GPS、惯导系统
下一篇:识别:视觉系统算法
相关资讯
- 2015年主要轻客企业销量增速情况(2016-03-27)
- 未来5年我国乘用车需求增长情况预测(2014-11-28)
- 车厂主导的TSP具备核心优势(2016-05-26)
- 汽车离合器的应用情况(2015-07-28)
- 汽车电子电器行业的周期性、区域性和季节性特征(2015-07-08)
- 调频连续波雷达系统工作原理(2016-10-19)
- 汽车零部件行业发展趋势(2015-04-07)
- 互联网企业入局有望打破行业封闭,创造新的盈利模式(2016-07-12)
合作媒体
最新报告
定制出版
热门报告
免责声明
中为咨询所引述的资料是用于行业市场研究以及讨论和交流,并注明出处,部分内容是由相关机构提供。若有异议请及时联系本公司,我们将立即依据相关法律对文章进行删除或作相应处理。查看详细》》
